23 Jun Uvod u distribuirane sisteme upravljanja kroz Emerson DeltaV DCS

Emerson DeltaV distribuirani upravljački sistem podržava različite standarde komunikacija sa merno regulacionom opremom kao što su klasični analogni standard 0/4-20 mA, HART protokol, Fondation Fieldbus, Actuator Sensor Interface bus, Profibus DP, DeviceNet itd., koji se mogu preko različitih ulazno izlaznih kartica povezivati na zajednički kontroler. Načini komunikacije između kontrolera i uređja u polju mogu biti ostvareni žičanim putem ili bežičnom komunikacijom. Moderna procesna industrija se ne može zamisliti bez potpuno automatizovanih vođenja procesa, koji se realizuju kontinuialnim i diskretnim sistemima automatskog upravljanja, razrađenim u teoriji upravljanja i stabilnosti sistema. Sistemi upravljanja se uslovno mogu se podeliti na:
• Centralizovane sisteme upravljanja,
• Distribuirane sisteme upravljanja(Distributed Control Systems – DCS),
• Nadzorno upravljačke sisteme (Supervisory Control and Data Acquisition – SCADA).
Razvoj računarke tehnike, softverskih alata i prenosa signala imao je veliki uticaj na razvoj upravljačkih sistema, standardizovanje komunikacionih protokola, osavreme-njavanje uređaja za merenje procesnih veličina itd.
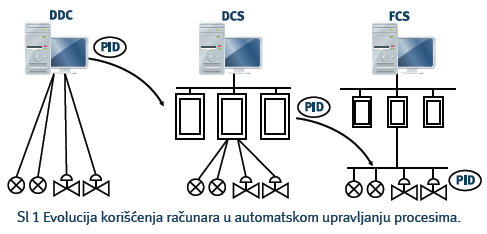
Na sl.1 je dat pregled razvoja upotrebe računara u sistemima upravljanja procesom. Kod direktnog računarskog upravljanja (Direct Digital Control – DDC), kao na sl.1a, se mogu primeniti sve prednosti digitalne obrade informacija (mogućnost izvođenja komplikovanih algoritama upravljanja, arhiviranje i lak pregled podataka, fleksibilnost upravljačkih algoritama, itd.).
Međutim u praksi se javio problem da upravljanje sa nekoliko stotina takvih petlji, uz korišćenje samo jednog računara, dovodi do niske pouzdanosti rada sistema. Osim toga u ovakvim sistemima jedan par žica se koristio za povezivanje uređaja u polju sa jednim kanalom I/O kartice upravljačkog računara, što je značajno poskupljivalo instalaciju. DCS, sl.1b karakteriše uvođenje digitalnih akviziciono-upravljačkih jedinica koje su postavljene na nivou procesa (procesne jedinice) sa sposobnošću da komuniciraju međusobno, kao i sa hijerarhijski višim nivoima upravljanja. Procesne jedinice su DCS kontroleri, u kojima se izvršava najveći deo aplikativne upravljačke podrške. Svaka procesna jedinica je zadužena za akviziciju podataka sa više senzora i upravljanje sa više upravljačkih petlji, pri čemu je veza sa instrumentacijom (transmiteri, pozicioneri) najčešće ostvarena žičano. Hijerarhijski viši nivo upravljanja vrši vizualizaciju procesa kojim se upravlja i potrebnu komunikaciju sa ljudskom posadom (pokretanje i zaustavljanje rada, promena režima rada, podešavanje raznih parametara itd.). Dalji razvoj distribuiranih sistema upravljanja ide u pravcu proširivanja distribucije sistema još više ka polju. Upravljački sistemi u polju (Field Control System – FCS) predstavljaju drugu generaciju distribuiranih upravljačkih sistema.
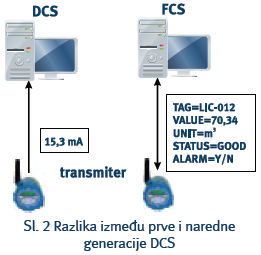 Podrazumevaju primenu mikrokontrolera u samim instrumentima (senzorima, transmiterima, aktuatorima i sl.). To su tzv. “pametni” (smart) aktuatori i transmiteri, gde je upravljačka logika spuštena na najniži mogući nivo, nivo uređaja, a komunikacija digitalnim protokolima omogućena u čitavom sistemu. Takvi inteligentni uređaji, osim informacije o procesnoj vrednosti, mogu prosleđivati npr. jedinstvenu oznaku transmitera LIC-012, jedinicu, status, stanje alarma i još desetine značajnih informacija o transmiteru kao što je prikazano na sl.2. Ovakvi uređaji često preuzimaju izvršenje složenijeg lokalnog upravljanja (npr. PID regulacija), čime značajno pojednostavljuju upravljanje uz istovremeno povećanje ukupne raspoloži-vosti sistema. Za razliku od prve generacije DCS, gde je otkaz jedne kartice na DCS kontroleru mogao da dovede do ispada iz funkcije nekoliko upravljačkih petlji, kod FCS otkaz uređaja
Podrazumevaju primenu mikrokontrolera u samim instrumentima (senzorima, transmiterima, aktuatorima i sl.). To su tzv. “pametni” (smart) aktuatori i transmiteri, gde je upravljačka logika spuštena na najniži mogući nivo, nivo uređaja, a komunikacija digitalnim protokolima omogućena u čitavom sistemu. Takvi inteligentni uređaji, osim informacije o procesnoj vrednosti, mogu prosleđivati npr. jedinstvenu oznaku transmitera LIC-012, jedinicu, status, stanje alarma i još desetine značajnih informacija o transmiteru kao što je prikazano na sl.2. Ovakvi uređaji često preuzimaju izvršenje složenijeg lokalnog upravljanja (npr. PID regulacija), čime značajno pojednostavljuju upravljanje uz istovremeno povećanje ukupne raspoloži-vosti sistema. Za razliku od prve generacije DCS, gde je otkaz jedne kartice na DCS kontroleru mogao da dovede do ispada iz funkcije nekoliko upravljačkih petlji, kod FCS otkaz uređaja 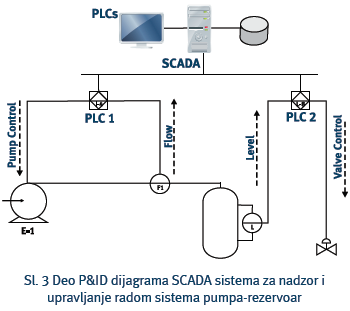 dovodi do otkaza samo jedne upravljačke petlje.
dovodi do otkaza samo jedne upravljačke petlje.
Razlika između SCADA i DCS sistema
U industriji se uglavnom koriste sistemi koji su kombinacija PLC i SCADA-e ili DCS(FCS) sistemi. Ovakvi sistemi obavljaju nadziranje i kontrolu nad industrijskom opremom i procesom omogućavajući da njihove performanse ostanu unutar potrebnih radnih tolerancija i specifikacija. Postoje razlike između SCADA/PLC i DCS sistema. Kod SCADA/PLC sistema SCADA deo vizualizuje podatke iz procesa, kojim upravljaju PLC-ovi. Kod distribuiranih upravljačkih sistema elementi upravljanja nisu koncentrisani. DCS sistemi pružaju mogućnost da se upravljačka logika distribuira na raznim nivoima, počev od radnih stanica, preko lokalnih kontrolera pa do pametnih uređaja, što daje fleksibilnost ostvarenja optimizacije sistema sa raznih aspekata. Sa aspekta sigurnosti jedna greška u PLC-umože da onesposobi upravljanje delom procesa, koji je baziran na SCADA/PLC sistemu, dok kod DCS greška na nivou lokalnog upravljanja utiče na samo jednu upravljačku petlju. Proizilazi da se arhitektura DCS sistema se otimalnije prilagođava procesu. Kod manjih industrijskih celina primenjuju se SCADA/PLC sistemi, zbog niža cene u odnosu na DCS sisteme koji su za veće, kompleksnije i geografski disperzivne sisteme pravo rešenje.
Arhitektura DeltaV DCS
DeltaV distribuirani sistem upravljanja omogućava korisnicima lako pokretanje i konfiguraciju sistema korististeći plug-and-play tehnologiju za konfiguraciju hardvera, biblioteku gotovih 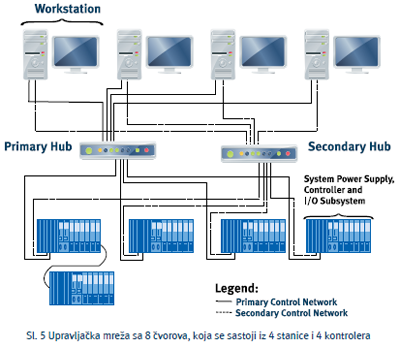 kontrolnih modula (I/O, Analog Control, Logical, Math, Advanced Control itd.). Poznate drag-and-drop tehnike
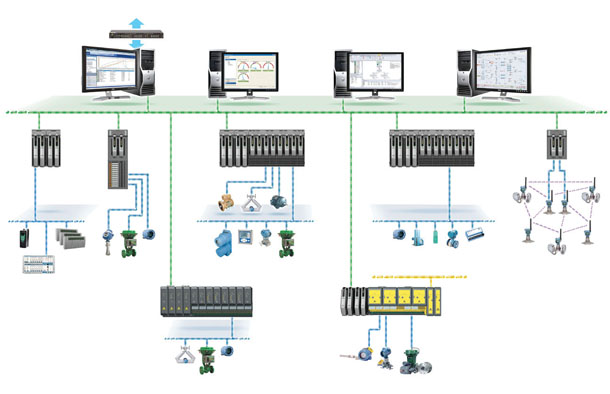
kontrolnih modula (I/O, Analog Control, Logical, Math, Advanced Control itd.). Poznate drag-and-drop tehnike 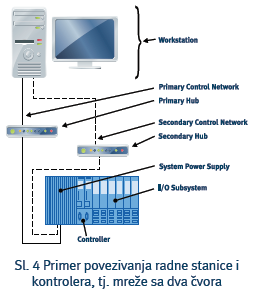 ubrzavaju i olakšavaju podešavanje i modifikaciju sistema, a grafičko okruženje koje se sreće kod Microsoft Windows operativnog sistema (npr. Windows Explorer) omogućava lako razumevanje DeltaV razvojnog okruženja. Primenjuje u rafinerijama, ptrohemijskoj i hemijskoj industriji, u postrojenjima za naftu i gas, farmaceutskoj industriji itd. širom sveta. Bazni DeltaV DCS se sastoji iz radne stanice (workstations) i kontrolera, koji mogu biti direktno povezani mrežnim kablom ili preko sviča, kao na sl.4, a njegovom multiplikacijom dobijamo složenije sisteme kao na sl.5.
ubrzavaju i olakšavaju podešavanje i modifikaciju sistema, a grafičko okruženje koje se sreće kod Microsoft Windows operativnog sistema (npr. Windows Explorer) omogućava lako razumevanje DeltaV razvojnog okruženja. Primenjuje u rafinerijama, ptrohemijskoj i hemijskoj industriji, u postrojenjima za naftu i gas, farmaceutskoj industriji itd. širom sveta. Bazni DeltaV DCS se sastoji iz radne stanice (workstations) i kontrolera, koji mogu biti direktno povezani mrežnim kablom ili preko sviča, kao na sl.4, a njegovom multiplikacijom dobijamo složenije sisteme kao na sl.5.
Strategije upravljanja u DeltaV
Sistem se konfiguriše putem povezivanja modula, koji su najmanje upravljačko logičke celine DCS-a. Moduli sadrže algoritme (logički koraci koji definišu ponašanje modula.), uslove, alarme, displeje (indikatore), informacije o istoriji događaja i signala kao i druge karakteristike koje definišu procesnu celinu. DeltaV radi sa upravljačkim modulima (Control Module), modulima opreme (Equipment Module) i modulima procesnih jedinica (Unit Module). Upravljački moduli sadrže jedinstvenu upravljačku celinu, kao što je merno-regulaciona petlja ili motor sa pridruženom (start-stop) logikom. Kod ovakvih modula, koji se formiraju oko procesnog uređaja i pripadajuće upravljačke logike, pojednostavljeno je kreiranje, daunloudovanje, rad, kao i otkrivanje i otklanjanje grešaka. Takođe se jednostavno isključuju ili dovode u stanje mirovanja (out of service), a pri tome nemaju uticaja na funkciju drugih modula. Algoritam u nadređenom modulu opreme usklađuje rad podređenih modula koje sadrži. Svi moduli upravljanja i opreme pridruženi konkretnoj procesnoj jedinici sadržani su unutar modula te procesne jedinice. Funkcionalni blokovi (Function Blocks) su blokovi za kreiranje kontinualnih i diskretnih algoritama unutar modula, koji omogućavaju upravljanje ili nadzor nad procesom. Biblioteka DeltaV sadrži šablone funkcionalnih blokova za analogno upravljanje (predpojačanje/pojačanje, lead/lag, PID, itd.), logičke ulazno izlazne kartice (analogne i diskretne ulaze/izlaze) i za druge osnovne funkcije. Pri uvođenju novog modula možemo koristiti module iz biblioteke ili ih kreirati od početka. Novoformirane module možemo dodati u biblioteku 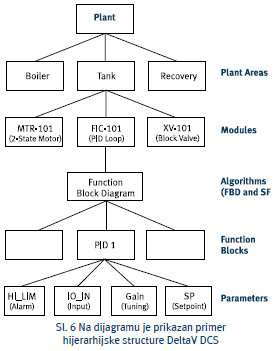 modula i dalje koristiti kao šablone. Svaki funkcioni blok sadrži parametre koji mogu da se modifikuju za konkretnu primenu. Algoritmi se po složenosti kreću od prostih ulaznih konverzija do veoma složenih upravljačkih strategija. Funkcionalnii blokovi mogu da se kombinuju u kompozitne funkcione blokove u cilju razvoja složenih algoritama. DeltaV sitem podržava sekvencijalne funkcionalne dijagrame (Sequential Function Charts -SFCs). Parametri su podaci koje definiše korisnik, a koriste se u algoritmu modula da bi se konkretno realizovao određeni proračun i određena logika. Mogu biti ulazni ili izlazni zavisno od tipa informacija koje predstavljaju. Sintaksa koja predstavlja putanju do parametra je data na sledeći način: DS.CM/FB/Parameter.Type_Field primer: DVSYS.FIC-20X/PID1/OUT.F_CV gde je DS (Data Server), CM (Control Module) je upravljački modul, FB (Function Block) je funkcionalni blok, Parameter je parameter, Type može biti F (float) tj. realan broj ili A(ascii) što je tekst. Field može biti CV (Current Value) tekuća vrednost ili ST(Status). Moduli koji rade zajednički na ostvarenju jedne specifične upravljačke funkcije su tipično grupisani u jednu oblast (Area), koja predstavlja logički deo procesa. Odgovorni inženjer za konfiguraciju konkretno određuje kako logički podeliti proces po oblastima.
modula i dalje koristiti kao šablone. Svaki funkcioni blok sadrži parametre koji mogu da se modifikuju za konkretnu primenu. Algoritmi se po složenosti kreću od prostih ulaznih konverzija do veoma složenih upravljačkih strategija. Funkcionalnii blokovi mogu da se kombinuju u kompozitne funkcione blokove u cilju razvoja složenih algoritama. DeltaV sitem podržava sekvencijalne funkcionalne dijagrame (Sequential Function Charts -SFCs). Parametri su podaci koje definiše korisnik, a koriste se u algoritmu modula da bi se konkretno realizovao određeni proračun i određena logika. Mogu biti ulazni ili izlazni zavisno od tipa informacija koje predstavljaju. Sintaksa koja predstavlja putanju do parametra je data na sledeći način: DS.CM/FB/Parameter.Type_Field primer: DVSYS.FIC-20X/PID1/OUT.F_CV gde je DS (Data Server), CM (Control Module) je upravljački modul, FB (Function Block) je funkcionalni blok, Parameter je parameter, Type može biti F (float) tj. realan broj ili A(ascii) što je tekst. Field može biti CV (Current Value) tekuća vrednost ili ST(Status). Moduli koji rade zajednički na ostvarenju jedne specifične upravljačke funkcije su tipično grupisani u jednu oblast (Area), koja predstavlja logički deo procesa. Odgovorni inženjer za konfiguraciju konkretno određuje kako logički podeliti proces po oblastima.
Čvorovi (nodes) su fizički delovi opreme upravljačke mreže (npr. kontroler ili radna stanica). Nakon konfiguracije sistema, kojom se podešava kako koji čvor da reaguje i koju informaciju da prihvati ili upamti iz procesa, potrebno je daunloudovati module u kontroler. Oznaka uređaja (Device Tag – DT) predstavlja jedinstvenu oznaku instrumenta, ventila ili nekog drugog uređaja u polju. Oznaka signala (Device Signal Tag – DST) predstavlja jedinstvenu oznaku signala sa nekog uređaja. (jedan uređaj može imati samo jedan DT ali više različitih DST). Alarmi upozoravaju operatera da se događaj izvršio (alarmi su pridruženi modulima). Najčešće želimo da operater inicira neke akcije i da se odgovori na alarme. Alarmi mogu biti vizueni ili zvučni. Baza podataka (database) sadrži informacije o konfiguraciji sistema i omogućava da je off-line menjamo bez uticaja na ostale delove procesa. Moguće je takođe i on-line praćenje nadzorno upravljačkih algoritama kao i njihova modifikacija. Na sl.6 grafički je prikazan primer hijerarhijske strukture DeltaV, koja je prethodno objašnjena.
DeltaV sistem automatskog upravljanja obezbeđuje sveobuhvatan sistem alarmnog obaveštavanja. Upozorenja koja stižu sa uređaja u polju u DeltaV sistemu nazivaju se PlantWeb upozorenja. Plant-Web upozorenja mogu stići sa uređaja koji komuniciraju preko FOUNDATION fieldbus-a, kao i sa uređaja koji komuniciraju preko HART-a. PlantWeb upozorenja sa uređaja obezbeđuju pouzdano praćenje stanja uređaja i pomažu da se preduprede neželjene situacije ranom dijagnostikom problema same opreme i u nekim slučajevima i samom procesu.
Klasični upravljački sistemi su generisali alarme samo u slučaju da procesni uslovi odstupaju isuviše od uobičajenih. Ovi alarmi najčešće su malo doprinosili identifikaciji uzroka problema, kao što je stanje uređaja u polju ili neočekivane promene u procesu.
 PlantWeb upozorenja pružaju mogućnost za izveštavanje o ispravnosti uređaja i njegovoj mogućnosti da obavlja svoj primarni zadatak. Takođe, zahvaljujući PlantWeb upozorenjima, pre nego se dopusti da na uređaju dođe do kvara koji bi uticao na proizvodnju mogu se preduzeti određene korektivne mere da bi se sprečili nepotrebni zastoji i gubici. PlantWeb upozorenja su implementirana u DeltaV sistemu kao posebna podgrupa alarma – alarmi sa uređaja (PlantWeb alerts). Većina upravljačkih sistema koristi jedan mehanizam za obaveštavanje o alarmima vezanim za proces, a drugi za obaveštavanje o ispravnosti hardvera. PlantWeb upozorenja proširuju obim praćenja ispravnosti sistema pokrivanjem i uređaja u polju. DeltaV sistem ima ugrađena upozorenja sa uređaja i hardverska upozorenja u okviru sistema za upravljanje alarmima, čime obezbeđuje konzistentan mehanizam za prikupljanje svih alarma i upozorenja u sistemu.
PlantWeb upozorenja pružaju mogućnost za izveštavanje o ispravnosti uređaja i njegovoj mogućnosti da obavlja svoj primarni zadatak. Takođe, zahvaljujući PlantWeb upozorenjima, pre nego se dopusti da na uređaju dođe do kvara koji bi uticao na proizvodnju mogu se preduzeti određene korektivne mere da bi se sprečili nepotrebni zastoji i gubici. PlantWeb upozorenja su implementirana u DeltaV sistemu kao posebna podgrupa alarma – alarmi sa uređaja (PlantWeb alerts). Većina upravljačkih sistema koristi jedan mehanizam za obaveštavanje o alarmima vezanim za proces, a drugi za obaveštavanje o ispravnosti hardvera. PlantWeb upozorenja proširuju obim praćenja ispravnosti sistema pokrivanjem i uređaja u polju. DeltaV sistem ima ugrađena upozorenja sa uređaja i hardverska upozorenja u okviru sistema za upravljanje alarmima, čime obezbeđuje konzistentan mehanizam za prikupljanje svih alarma i upozorenja u sistemu.
Dijagnostika u HART i FOUNDATION fieldbus uređajima obezbeđuje osnovu za otkrivanje takvih stanja uređaja koja bi mogla dovesti do abnormalnih pojava u procesu. FIELDBUS uređaji interno generišu alarme u zavisnosti od stanja uređaja i šalju ih DeltaV sistemu za obaveštavanje i memorisanje. Za razliku od FOUNDATION fieldbus uređaja, HART uređaji ne podržavaju lokalne alarme: HART uređaji generišu alarme i prosleđuju ih centralnom sistemu na dalju obradu. Za uređaje koji komuniciraju preko HART-a upozorenja vezana za konfiguraciju, obaveštavanje i izveštavanje su u nadležnosti DeltaV sistema, a ne uređaja. PlantWeb upozorenja se koriste za prikazivanje stanja uređaja u proaktivnoj, preglednoj strukturi koja pomaže korisniku da reaguje na odgovarajući način. Svaki uređaj u okviru DeltaV sistema ima mogućnost da prijavljuje ova upozorenja. Upozorenja sa uređaja u sistemu DeltaV su organizovana u tri vrste PlantWeb upozorenja u zavisnosti od uticaja svakog od njih na ispravnost uređaja. Četvrto, komunikaciono upozorenje, stiže od samog DeltaV sistema.
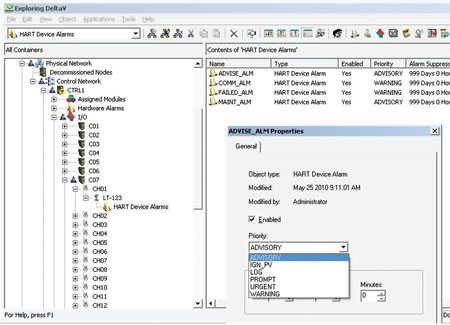
GREŠKA (FAILED_ALM) – uređaj nije u stanju da obavlja svoju primarnu funkciju i kao takav verovatno utiče na proces
ODRŽAVANJE (MAINT_ALM) – uređaj je dotrajao i može uticati na proces
SAVETODAVNI (ADVISE_ALM) – uređaju je potreban preventivni servis ili ima podatke koji čekaju na upis
KOMUNIKACIONI (COMM_ALM) – uređaj ne komunicira više preko H1 segmenta ili HART kanala
Osim toga, PlantWeb upozorenjima su dodeljeni prioriteti u cilju bolje organizacije. Upozorenja vezana za stanje uređaja mogu biti jednaka za sve uređaje istog tipa, ali uticaj stanja određenog uređaja na proizvodnju i kvalitet proizvoda može biti sasvim drugačiji u zavisnosti od toga koliko se taj uređaj koristi. Prioritet može, u tom slučaju, da podigne nivo važnosti upozorenja.
DeltaV sistem obezbeđuje za napredne korisnike mogućnost podešavanja parametara alarma u zavisnosti od praktičnih potreba. Dok će za većinu korisnika podrazumevana podešavanja DeltaV sistema biti dovoljna za potpunu implementaciju PlantWeb alarma, napredni korisnici lako mogu primeniti neke od jedinstvenih strategija upravljanja alarmima kao npr.
• Kreiranje DeltaV alarmnih prioriteta prilagođenih hardverskim alarmima datog uređaja
• Definisanje dela postrojenja sa (oblasti) iz koje se prikazuju alarmi uređaja
• Kreiranje šablona sa unapred podešenim prioritetima PlantWeb upozorenja za svaki tip uređaja, uključujući mogućnost mapiranja nivoa alarma kod HART uređaja
• Podešavanje alarmnih tagova za individualne radne stanice
Uređaji najviše klase iz proizvodnog programa kompanije Emerson Process Management obezbeđuju i dijagnostička upozorenja koja se odnose na okolinu samog uređaja kao što su pumpe čija se kavitacija može detektovati analizom šuma signala pritiska ili napojne jedinice čiji se napon napajanja meri i analizira. Sva navedena podešavanja su primenjiva i na ovu vrstu alarma. Kako broj i sofisticiranost upozorenja raste, postoji sve veća potreba da se razume uloga svakog pojedinačnog uređaja i definiše koje upozorenje je odgovarajuće za određenu instalaciju. Takođe, važno je da se vodi evidencija o upozorenjima koja se koriste/ne koriste za svaki uređaj i razlozima. Na ovaj način, kada se kasnije javi potreba za konfigurisanjem uređaja, sačuvane su dobre informacijeza postizanje konzistentnog i efikasnog podešavanja. Kada se pravilno postave, PlantWeb upozorenja mogu značajno poboljšati vidljivost sistema i smanjiti broj neplaniranih prekida.
 српски
српски